The Pinhole Camera
- This might help today.
- The Pinhole camera
- Is a box with photographic material on the back wall.
- There is a pinhole in the center of the front.
- Let's consider the pinhole to be (0,0,0).
- The back wall is at -d
-
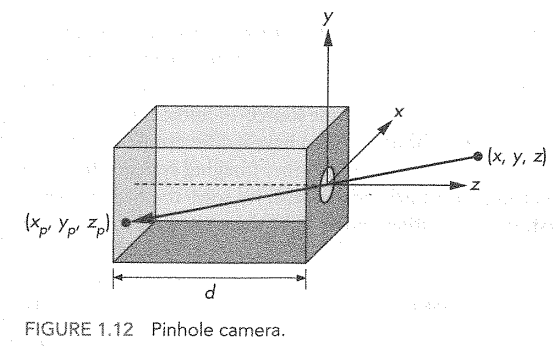
- We are looking along the positive "z" axis
- And we are looking at a point (x,y,z) in space.
- Notice, the photographic material is centered at (0,0,-d)
- Light will travel from the point (x,y,z)
- Through the pinhole
- And "strike" the photo at $(x_p, y_p, z_p)$
- Let's assume we know the "color" of point, what pixel should we set to that color
- IE, where is $(x_p, y_p, z_p)$
- $z_p$ is -d by definition
- For simplicity, assume $x=0$
- We have something like this
-
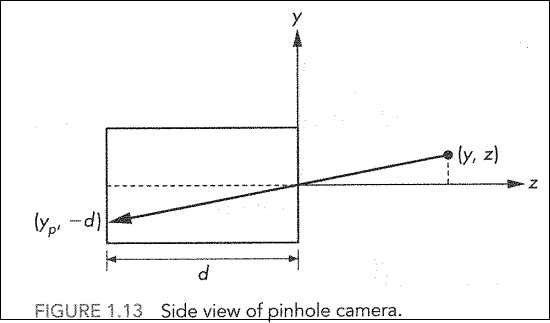
- In this case, we know $(0,y, z)$, the point projected into the yz-plane
-
- We know $z_p = -d$
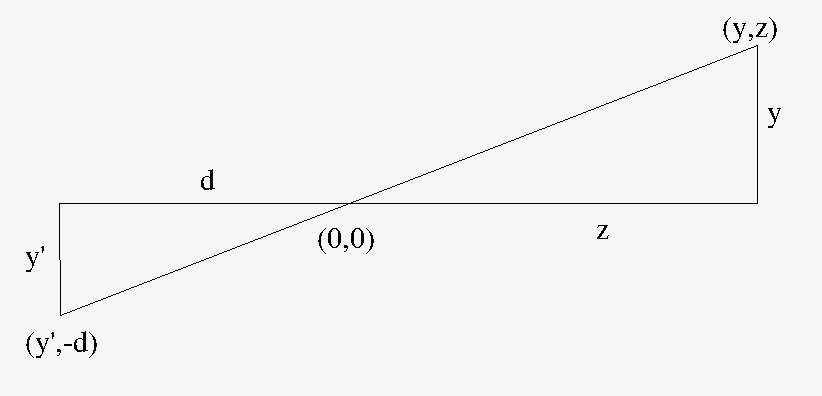
- We can use similar triangles to compute $y_p$.
- $\frac{y_p}{-d} = \frac{y}{z}$
- $y_p = \frac{y}{z}\times -d$
- $y_p = -\frac{y}{\frac{z}{d}}$
- The same is true for $x_p$
- ie $x_p = -\frac{x}{\frac{z}{d}}$
- So the new position will be $(-\frac{x}{\frac{z}{d}}, -\frac{y}{\frac{z}{d}}, -d)$
- A modification is to move the "photographic plate " to in front of the camera.
-
- The new position will then be $(\frac{x}{\frac{z}{d}}, \frac{y}{\frac{z}{d}}, d)$
- We can develop the matrix
$\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & \frac{1}{d} & 0 \end{bmatrix}$
- This matrix needs to be applied AFTER all of the other transformations have been accomplished.
- Later we will call this the Projection matrix.
- This is because it projects the points from three space to two space.
- Notice that all points along the line $(x,y,z) , (x_p, y_p, d)$ are projected to the same point.
- If we keep track of depth, we can decide which to display/store in the frame buffer..
- A second parameter, the "height" h of the photographic plate controls the view angle
- Again a projection into the YZ plane.
-
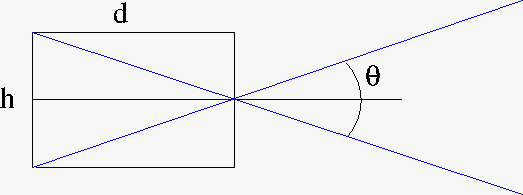
- $\tan(\theta) = \frac{opposite} {adjacent}$
- opposite = $\frac{h}{2}$
- adjacent = $d$
- $ \tan(\frac{\theta} {2}) = \frac{\frac{h}{2}}{d} $
- $ \tan(\frac{\theta} {2}) = \frac{h}{2d} $
- In this case $\theta = 2 \tan^{-1}(\frac{h}{2d})$
- The same calculation is true for x.
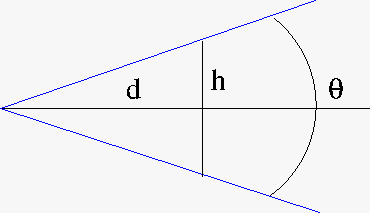
- But for non-square "photographic plates" we will have different angles.
- The same is true for the modified camera
-
- We will further develop these ideas, but in general
- you can change d,
- you can change h (and w)
- you can change the alignment of the "photographic plate"
- Location in space
- Angles.
- We normally add a back plane
- This allows us to throw away things that are "too far away"
- This forms the view frustum.
- What would the projection matrix
$\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}$ do?