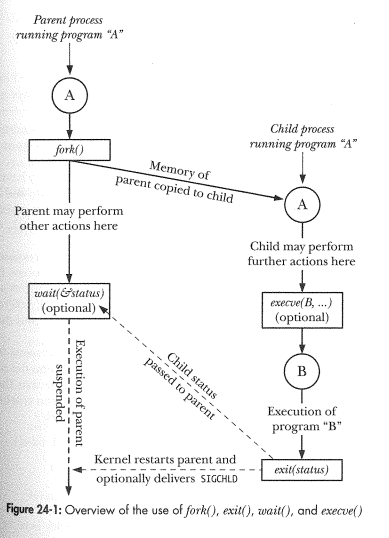
- fork() - create a nearly identical copy of a process
- exec - replace the memory (including code) of a process.
- exit() - terminate a process
- wait() - receive notification that a child process has terminated.
-
#include <unistd.h> pid_t fork(void); - Create a duplicate of the process except
- Return value: 0 for child, pid of child for parent.
- The Child has a unique pid.
- The ppid of the child is the pid of the parent.
- Some topics we have yet to discuss are different
- Charged resources are at 0
- Pending signals are cleared
- Locks are not inherited.
- Timers are not inherited
- Some advanced I/O information is not shared.
- So inherited attributes include
- File descriptors
- The entire virtual address space (all memory)
- Open Directory streams.
- Run forker
- Change the sleep and run forker again.
-
#include <sys/types.h> #include <sys/wait.h> pid_t wait(int *status); - Suspend operation until a child process changes state.
- This will be exit for a while for us.
- It will not block if there are unhandled events for which wait would block.
- The return value is the pid of the proces which exits.
- The status parameter contains information, we will look at this later.
- For increased speed, linux (and most uinx versions) use a copy on write scheme for forked processes.
- When a process is forked, the parent and child both share the same memory.
- If one or the other writes before an exit, the memory is copied.
- See myMemTest.C
- At one point, before copy on write, vfork was implemented.
- The author says to avoid use of vfork.