Interrupts
- 1.2 of the book.
- Hardware watches for "things" out of the ordinary to occur
- As you can see, some of these are maskable and some are unmaskable
- maskable interrupts can be blocked in critical sections of the code.
- A simple use of interrupts is for dealing with devices.
- The device driver in the kernel transfers the correct data, via the bus, to the device.
- Think address to read and command to make the device read.
- The device performs the action
- The device writes data to a buffer for the OS to read
- Then the device sends an interrupt to the kernel so it knows that the data is ready.
- When the CPU receives the interrupt
- It stops what it was doing and handles the request.
- The request is processed
- The CPU returns to the current operation.
-
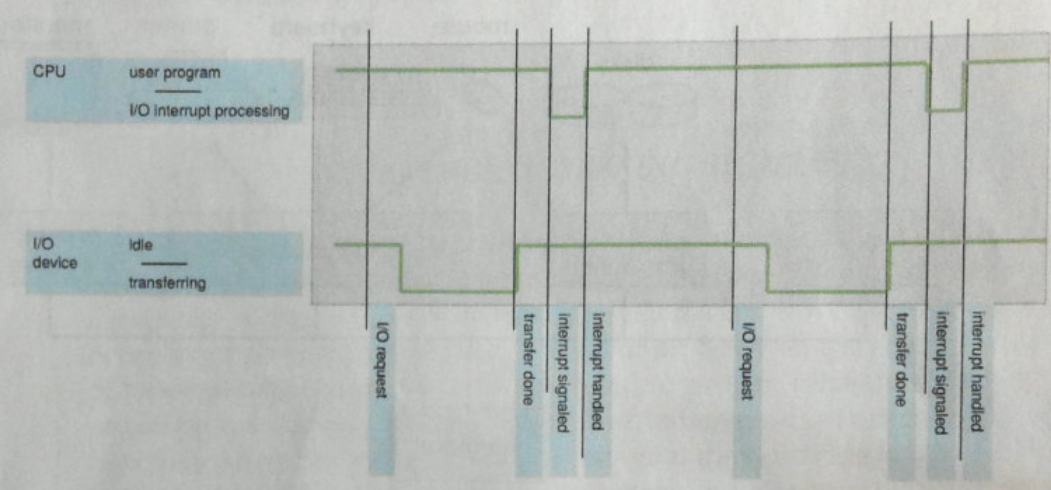
- This process minimizes main program interruption.
- Compare the is to polling
- The kernel constantly checks the devices to see if they have finished anything!
- The part of the kernel that handles the interrupt is the interrupt service routine.
- This could be a generic routine that looks at the interrupt and calls a specialized routine
- But there is a need to be fast.
- We have many interrupts.
-
watch -n0.1 cat /proc/interrupts
- watch does a process over and over
- -n0.1 means run every .1 second
-
cat is a program that shows the contents of a file to the screen.
- Interestingly enough, wait it's self will use a timer.
- Which will cause an interrupt every .1 second.
- So we need as fast a mechanism as possible
- An interrupt table, or vector.
- Hard coded in the kernel
- At each interrupt number, there is an address of code to handle the interrupt. (an interrupt service routine)
- Saves the state if necessary
- Handles the interrupt
- Restores the state.
- In practice
- There is a buffer called the interrupt-request line
- The CPU examines this after every F-E-D cycle
- When this is high, the CPU reads the number and calls the Interrupt handler routine.
- jmp InterruptVector[interrupt number]
- At a higher level we say
- The device controller raises the interrupt
- The CPU catches the interrupt
- And the CPU dispatches the interrupt
- Then the interrupt handler clears the interrupt.
- There are several problem here
- We might have multiple interrupts occur simultaneously or nearly so.
- We might have different levels of severity (hardware fault vs new packet arrives)
- To handle this, interrupt control hardware is implemented.
- Two separate lines, one for maskable and one for non-maskable interrupts.
- Since there may be may devices that give the same interrupt, a list of handlers may be present
- They are called one by one until the proper one is found.
- A priority is assigned to make sure important interrupts are handled first.
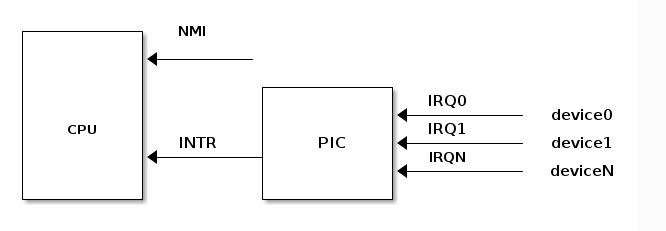
- In the intel chip, this is accomplished through the Programmable Interrupt controller or PIC
-
 (linux-kernel-labs.github.io).
(linux-kernel-labs.github.io).
- The NMI line is for non maskable interrupts
- These are most likely the ones that we can't delay
- The inter line is for maskable interrupts.
- These, as the picture indicates, are probably I/O interrupts,
- And thus they can be delayed.
- The PIC will prioritize the low level interrupts.
- These can be built to share inturrupts over multiple cpus.
- There is much more to this, if the book comes back, we will to.